
Notes Before Coding:
- Always back up your original ECU data before making any changes.
- Make sure the DTS Monaco project file matches your ECU version.
- Perform coding only when the vehicle battery is fully charged or supported by a power supply.
How to Code Pedal Characteristic Curve for Faster Engine Response Using DTS Monaco on Mercedes
Tuning the Pedal Characteristic Curve (Pedalkennlinie) allows you to enhance your Mercedes’ throttle response — making acceleration feel sharper and more immediate. Below is a step-by-step guide to perform this coding safely and effectively using DTS Monaco.
Step 1: Connect Device with DTS Monaco and the Vehicle
- Launch DTS Monaco on your laptop.
- Connect your diagnostic interface (e.g., VXDIAG, ICOM Next, or C6 DoIP) to the OBD port of the vehicle.
- Ensure the connection is stable and the ignition is in ON mode.
- Load the appropriate ECU project file (e.g., CR43 or MED177) for your vehicle model.
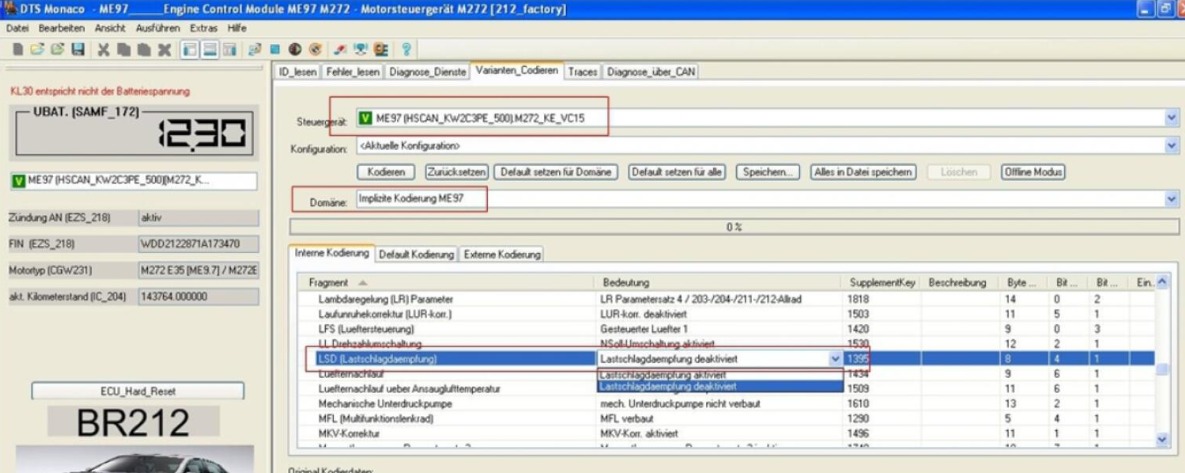
Step 2: Access Variant Coding
- Navigate to the “Variant Coding” section in DTS Monaco.
- Under the “Domäne” (Domain) menu, select “Implizite Kodierung ME97”.
- Locate the parameter “LSD” and change its value to “deactive”.
- This step helps unlock additional engine response adjustments within the ECU.
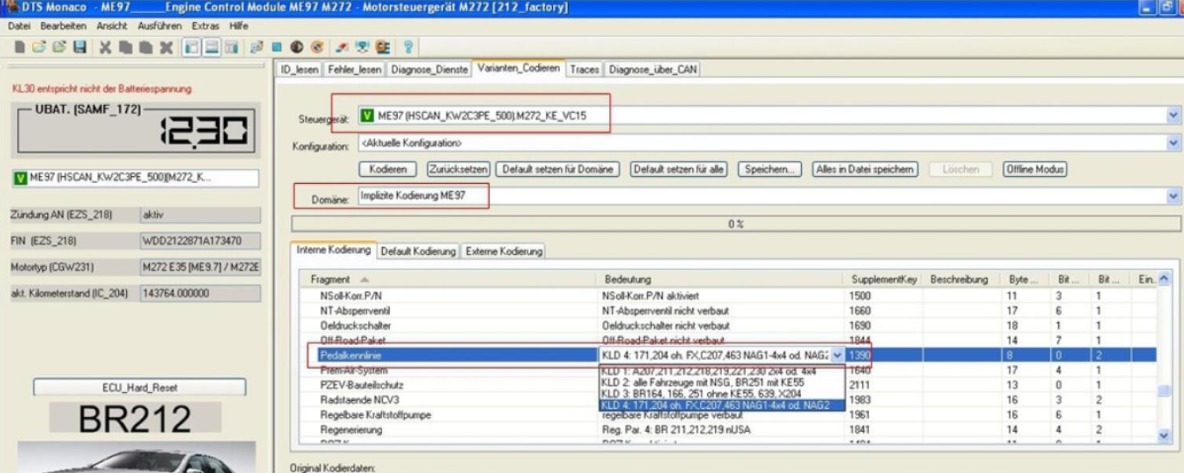
Step 3: Modify Pedal Characteristic Curve
- Search for the parameter “Pedalkennlinie” (Pedal Characteristic Curve).
- Change the setting to: “KLD 4: 171.204 oh FX C207 463 NAG1 4×4 od NG2”
This configuration applies a sportier throttle map, improving how quickly the engine reacts to pedal input.
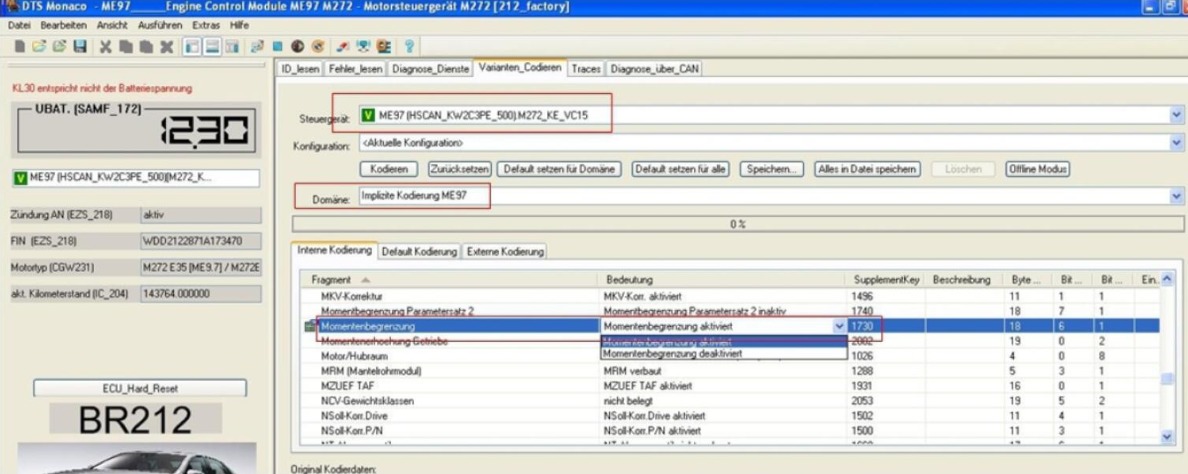
Step 4: Adjust Torque Limiter Setting
- Find the parameter “Momentenbegrenzung” (Torque Limitation).
- Set it to “active” to allow faster torque delivery and maximize the effect of the new throttle curve.
Step 5: Perform a Hard Reset
- After completing all coding changes, perform a hard reset of the ECU.
- This ensures that all new settings are applied and the system operates with the updated configuration.
- Restart the vehicle and test the throttle response — you should notice a more responsive and dynamic acceleration.